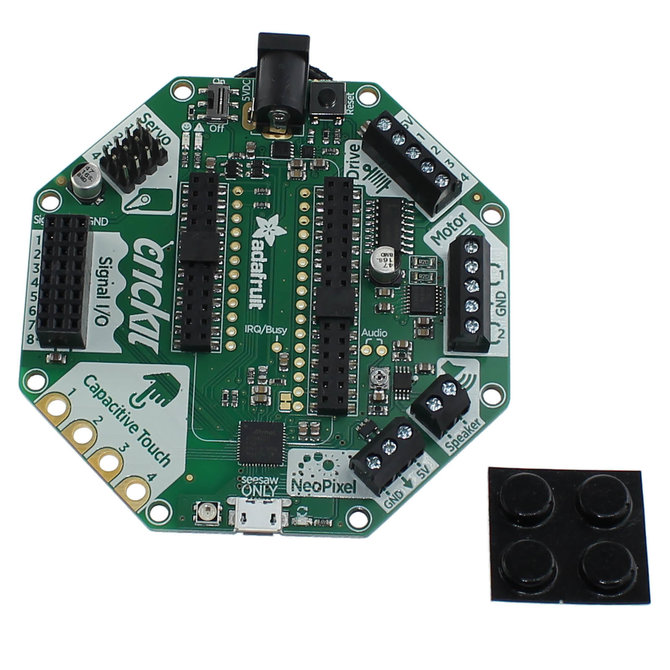
This Cricket interfaces with Feather style controllers with stacking headers. We use it to interface the ESP32 Feather in our Skitter robots. Plug in the same ESP32 Feather or any other and your robot projects are on their way!
This Crickit is powered by seesaw, an I2C-to-whatever bridge firmware. So you only need to use two I2C data pins to control the huge number of inputs and outputs on the Crickit. All those timers, PWMs, sensors are offloaded to the co-processor.
The only thing that is not managed by seesaw is the audio output. On our Feather M0's this is a true analog output (DAC) and you can play audio clips with CircuitPython or Arduino.
You get to use all the non-I2C signal pins on your feather and get a boat-load of extra in/out pins, motor controllers, capacitive touch sensors, a NeoPixel driver and amplified speaker output. It complements & extends your Feather so you can still use all the goodies, including stacking FeatherWings on top.
Features:
- 4 - Analog or Digital Servo control with 16-bit timers
- 2 - Bi-directional brushed DC motor control, 1 Amp current limited each, with 8-bit PWM speed control
- 4 - High current "Darlington" 500mA drive outputs with kick-back diode protection. For solenoids, relays, large LEDs, or one uni-polar stepper
- 4 - Capacitive touch sensors with alligator-pads
- 8 - Signal pins, digital in/out or analog inputs
- 1 - NeoPixel driver with 5V level shifter
- 1 - Class D, 4-8 ohm speaker, 3W-max audio amplifier
All are powered via 5V DC, so you can use any 5V-powered servos, DC motors, steppers, solenoids and, relays. This board will not work with different voltage components.
Please note this robot board does not require any soldering but you will need a power supply and a Feather to go along with the Crickit, and these are not included.