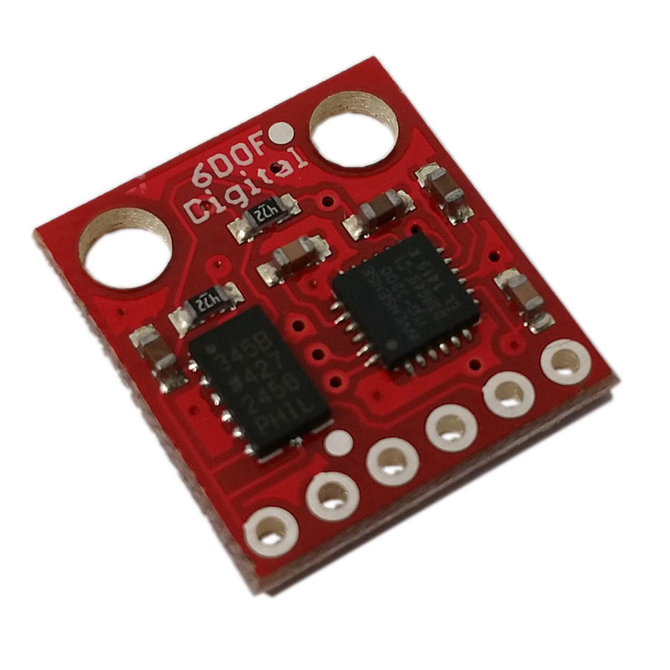
6 Degrees of Freedom IMU Digital Combo Board
This is a simple breakout for the ADXL345 accelerometer and the ITG-3200 MEMS gyro. This board provides 6 degrees of freedom. The sensors communicate over I2C and one INT output pin from each senso...Read More
Product Overview
During many applications, users use one sensor to back up the other. For example, the accelerometer is good at determining absolute angle, but not so good at this when the robot is moving. Also, the gyroscope is good at determining angular rate of change, but not good at finding an absolute angle.
It's a perfect fit for those looking for the Dual Use Gyro and Accelerometer Sensor Board that has been used in the past.
This IMU (Inertial Measurement Unit) is a system comprised of an accelerometer and a gyroscope working in tandem to compensate for the pitfalls of each other. Correctly setup, the gyro is able to kick in where an accelerometer leaves off, and vise versa. A gyro is great at measuring rotation, but has no understanding of orientation. And an accelerometer is good at determining orientation, but has no ability to keep track during movement and rotation. But just sticking these together wont give you a clean orientation, we need some hardcore math that will be able to take both the readings, along with previous readings, and make a really good estimate of what is going on.
Checkout a full tutorial of this board being used with an Arduino.
Features:
- ADXL345 accelerometer
- ITG-3200 gyro
- 3.3V input
- I2C interface
Mounting: Clearance holes for an M3 or 4-40 screw are present on the board. We recommend plastic screws for electrically isolating the board from a metal mounting plate. Also, it may be wise to use a shock-absorbing pad or grommet to isolate signals to the board.
Specifications
- Product Lifecycle: replaced by <a href="https://www.andymark.com/products/gadgeteer-pigeon-imu?Accessories=With%20cable">am-4079</a>
Returns
Returns are not accepted for this product.
Recommendations


1 review
-
"Gyro nice; too bad paired with the ADXL345"
"Gyro is very stable and very accurate. If not mounted at center of rotation, lateral (centrifugal) forces will affect spin rate accuracy, which can be programmatically corrected with a constant representing distance from center of rotation. Clockwise and counter-clockwise rotation is not necessarily balanced, so you need a different conversion factor for each direction. Signal to noise ratio is high enough to achieve stability less than 0.25 dpm drift. The ADXL345 sucks (always has, always will). Signal to Noise ration is very poor. Pretty much useless."





