
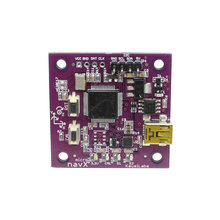
navX MXP Robotics Navigation Sensor
This item is restricted for shipment in some countries. Please check international shipping restrictions before ordering. NavX MXP 3.0 combines a 9-axis sensor (3-axis accelerometers, gyroscopes an...Read More
Product Overview
Key specifications include:
- High-accuracy pose (yaw/pitch/roll), with minimal yaw drift of ~1 degree per minute
- Tilt-corrected absolute compass heading with magnetic disturbance detection
- 9-axis heading fusing pose and magnetically-valid compass heading data
- Omnimount technology allows installation in various orientations, including horizontal, vertical and even upside-down.
Even in electro-magnetically challenging environments, the 9-axis heading combination of inertial and magnetically-valid compass heading data (e.g., before motors are energized, or when the robot is at rest) enable tracking of a robots absolute heading.
Because navX MXP is compliant with the National Instruments Custom Electronics Port (MXP) specification you can expand your roboRIO with additional Digital I/O, Analog I/O and Communications Interfaces.
navX MXP is designed for plug-n-play installation into an FRC roboRIO robotics control system: it connects to the roboRIO MXP connector for both power and data. Additionally, libraries and example source code for easy integration into the FRC roboRIO
Libraries and example code can be found here.
Specifications
- Interface(s): I2C, SPI, and TTL UART
- Product Lifecycle: replaced by <a href='/products/navx2-mxp-robotics-navigation-sensor'>am-3060c</a>
- Weight: less than 0.15 lbs
Documents
Returns
Returns are not accepted for this product.
Recommendations



7 reviews
-
It Just Works! Great Accuracy, Reliability, and Software Support
We on 1519 have used the navX-MXP for determination of heading and tilt on our robot every year since 2015, with excellent success. The navX was a key enabler for heading-maintenance on our 2015 mecanum drive robot, in 2016 going straight over defense both in autonomous and teleop, in 2017 for driving straight with our H-drive robot, in 2018 for accurately driving long distances on a specified heading in autonomous as well as controlling our upper assembly turret in field-oriented control, and in 2019 for providing heading updates for closed-loop heading control for placing hatch panels on the rocket and cargo ship. In all these situations, it just works. From our perspective, the functionality should have been in the roboRIO to begin with -- Kauai Labs made a great product, and AndyMark simplifies procurement for us. Thanks so much!
-
Review
4 Stars
-
Review
5 Stars
-
"navX Sensor"
"Works great. This was our first time using the navX and it served very well for us, especially in Autonomous mode. Over Night FedEx took 6 days to deliver. This sometimes convinces me to order through Studica instead since they can get us the part sooner. We are in Windsor and Border Detroit, so we have everything sent our Detroit Mailbox. But we may have to change things up next year."
-
Review
4 Stars
-
Review
4 Stars
-
Review
5 Stars





