



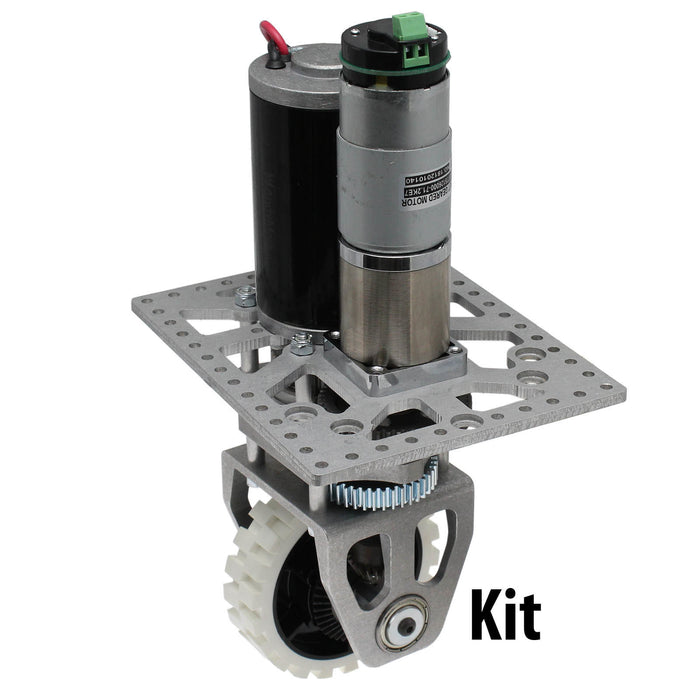
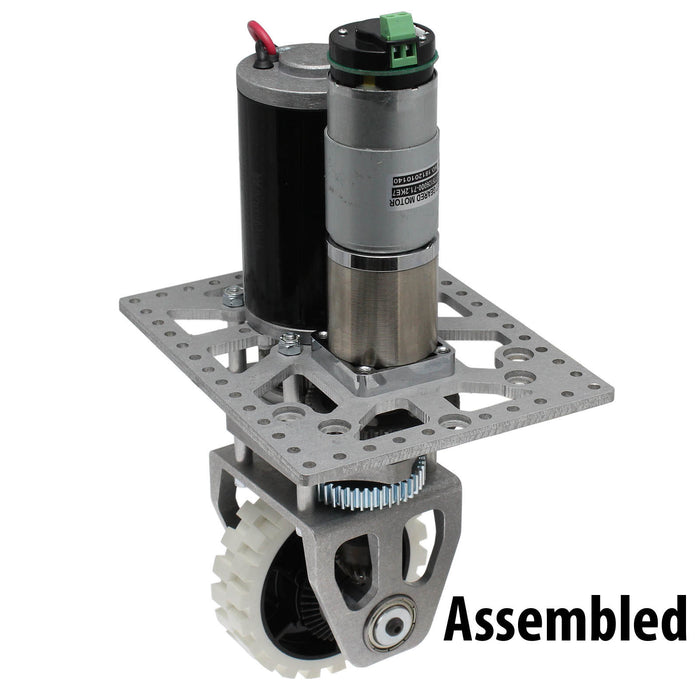

Swerve & Steer - Drive Motor:No Drive Motor
by AndyMark
Original price
$198.00 USD
-
Original price
$345.00 USD
Original price
$198.00 USD
$198.00 USD
-
$345.00 USD
$198.00 USD
-
$345.00 USD
Current price
$198.00 USD
This product is no longer for sale at AndyMark and has been discontinued , check out the SDS Mk4 Modules