Talon SRX Sentinel Interface Board
The Sentinel Breakout Board is used to easily connect a wide variety of digital and analog signal inputs to the Talon SRX speed controller. Inputs supported include incremental and absolute encoder...Read More
Product Overview
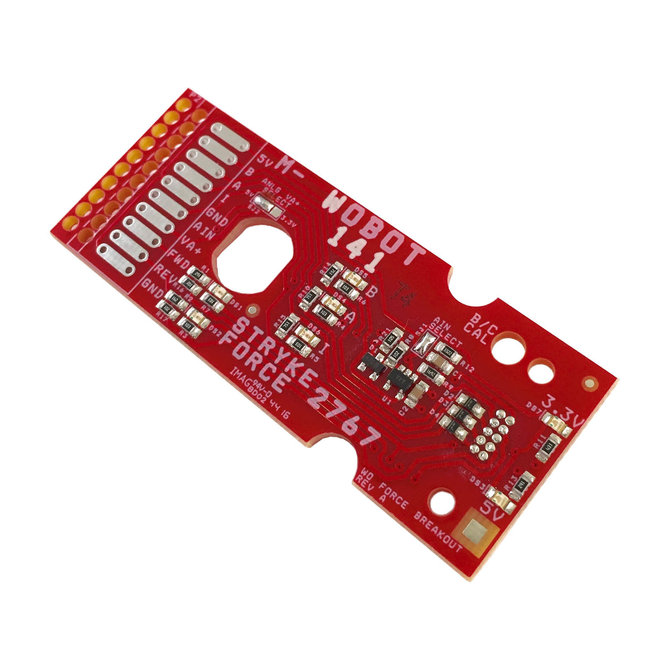
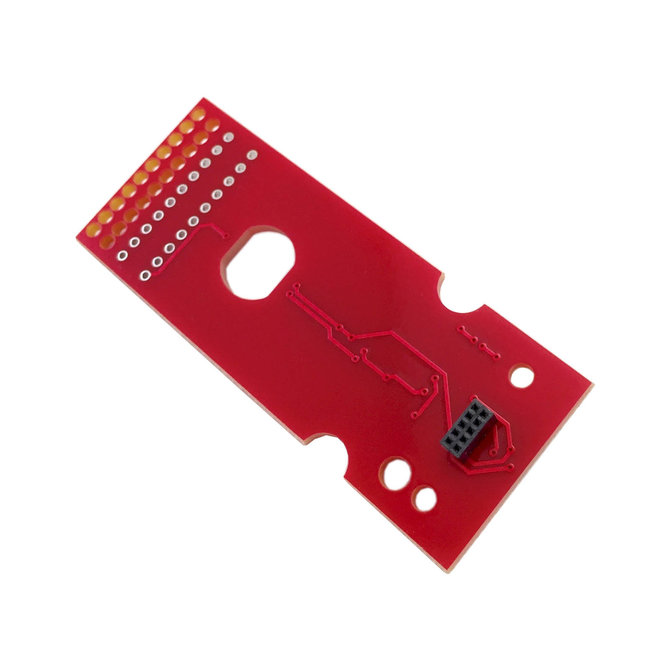
The Sentinel Breakout Board is used to easily connect a wide variety of digital and analog signal inputs to the Talon SRX speed controller. Inputs supported include incremental and absolute encoders, travel limit switches, string pots, distance ranging sensors, and much more. The Sentinel Breakout Board combines the most features and status reporting of any Talon interface product on the market. The Sentinel was a collaborative effort, designed and manufactured by the West Michigan Robotic Alliance.
Features:
The West Michigan Robotics Alliance (www.wmralliance.com) is an entity created to foster innovation and the sharing of ideas and products for the FIRST community. The Alliance is open to any FIRST robotics team or sponsor who would like to contribute ideas or financial support. All technology developed is open-source to the FIRST community. At present, the WMRA is comprised of Team 141, WOBOT and Team 2767, Stryke Force.

Features:
- The Sentinel mounts rigidly to the Talon SRX without spacers or insulating pads, using two Talon-SRX supplied 4-40 screws.
- Input wires can be soldered directly to pads on the breakout board, or you may install header or quick-connect terminal blocks onto the breakout board by soldering them into the through-holes provided (on .1 inch centers).
- Wires are secured by threading them through wire retention holes, if desired.
- Accepts all type of encoders; open collector output, push-pull output, and PWM Index (single-turn absolute position encoders that work by pulse width modulating the Index input).
- Includes internal pull-up resistors for the A/B/I encoder inputs
- Compatible with all Talon SRX models including version 1.4
- Encoder inputs supported: A, B, and Index
- Encoder power provided = 5VDC @ 40mA
- Includes internal pull-up resistors for the A/B/I encoder inputs
- Status lights on all digital inputs and supply voltages; 7 lights in total included
- 5VDC from Talon SRX present = green LED
- 3.3VDC from Talon SRX present = green LED
- Encoder A input low = amber LED
- Encoder B input low = amber LED
- Encoder Index input low = amber LED (can also be used with a PWM-style absolute encoder; brightness indicates approximate shaft angle)
- Motor Limit FWD input low = red LED
- Motor Limit REV input low = red LED
- Analog power provided = 3.3VDC or 5VDC @ 20mA, selected by solder jumper SJ-2
- Very high impedance analog input that is buffered and scalable 0-3.3V or 0-5V by a solder jumper SJ-1
- Talon SRX Speed Controller (am-2854)
- CIMcoder (am-3314)
- E4T OEM Miniature Optical Encoder Kit (am-3132)
- Hall Effect Two Channel Encoder (am-2816a)
- Absolute Encoder with Cable (am-2899); connect to analog power and input 0-5VDC
- NeveRest and PG series Gearmotors with encoders (various am-xxxx numbers)
- WAGO 233-510 or similar quick-connect terminal strip available from Newark, etc.
The West Michigan Robotics Alliance (www.wmralliance.com) is an entity created to foster innovation and the sharing of ideas and products for the FIRST community. The Alliance is open to any FIRST robotics team or sponsor who would like to contribute ideas or financial support. All technology developed is open-source to the FIRST community. At present, the WMRA is comprised of Team 141, WOBOT and Team 2767, Stryke Force.
Specifications
- Product Lifecycle: discontinued
Returns
Returns are not accepted for this product.
Recommendations




1 review
-
Review
5 Stars





